
Assistant Professor of Electrical Engineering, by courtesy, of Computer Science at Stanford University
I lead the Robotics and Embodied AI Lab at Stanford University( REAL@Stanford ). We are interested in developing algorithms that enable intelligent systems to learn from their interactions with the physical world, and autonomously acquire the perception and manipulation skills necessary to execute complex tasks and assist people.
To learn more about my group's research please visit our REAL website.
Email: shuran [at] stanford [dot] edu
Office: RM258, 350 Jane Stanford Way Packard Bldg Stanford, CA 94305.
Recent Talks
- Cross-Embodiment Learning for Dexterous Manipulation ( Recording ) at Handy Moves Workshop @ ICRA'25
- Self-Adaptive Robots ( Slides ) at Workshop on Embodiment-Aware Robot Learning (EARL) @ RSS'24
- Navigating the Upward Spiral for Sensorimotor Learning ( Slides ) Keynote at A Future Roadmap for Sensorimotor Skill Learning for Robot Manipulation @ ICRA’24
- What I wish I had for Robot Learning ( Slides ) Early Career Keynote at Conference on Robot Learning
- Learning Meets Gravity: Robots that Embrace Dynamics and Pixels ( Talk ) at CMU Robotics Institute
- Abstraction as Inductive Bias: Open-World 3D Scene Understanding without Open-World 3D Data ( Slide ) at Inductive Bias in Robot Learning Workshop @ CoRL'22
- The Reasonable Effectiveness of Dynamic Manipulation for Deformable Objects( Talk ) at University of Toronto Robotics Institute
- Structure from Action: Articulated Object Structure Discovery with Active Interactions ( Slides ) at ICCV Struco3D Workshop
- Self-Adaptive Manipulation ( Slides ) ( Talk )
- Unfolding the Unseen: Deformable Cloth Perception and Manipulation ( Slides Video PDF) ( Talk )
- Active Scene Understanding with Robot Interactions ( Slides )
- Category-level Pose Estimation ( Slides ) at ECCV2020 Workshop on Recovering 6D Object Pose
- Learning Visual Representations for Generalizable Manipulation ( Slides ) at CVPR2020 3D Scene Understanding for Vision, Graphics, and Robotics
Publications
 DexMachina: Functional Retargeting for Bimanual Dexterous Manipulation
DexMachina: Functional Retargeting for Bimanual Dexterous Manipulation
Zhao Mandi, Yifan Hou, Dieter Fox, Yashraj Narang, Ajay Mandlekar, Shuran Song
ICML 2026
Webpage •
Paper •
Code
Haochen Shi*, Songbo Hu*, Yifan Hou, Weizhuo Wang, C. Karen Liu†, Shuran Song†
RSS 2026
Webpage •
Paper •
Code
Xiaomeng Xu, Jisang Park, Han Zhang, Eric Cousineau, Aditya Bhat, Jose Barreiros, Dian Wang, Jeannette bohg, Shuran Song
RSS 2026
Webpage •
Paper •
Code
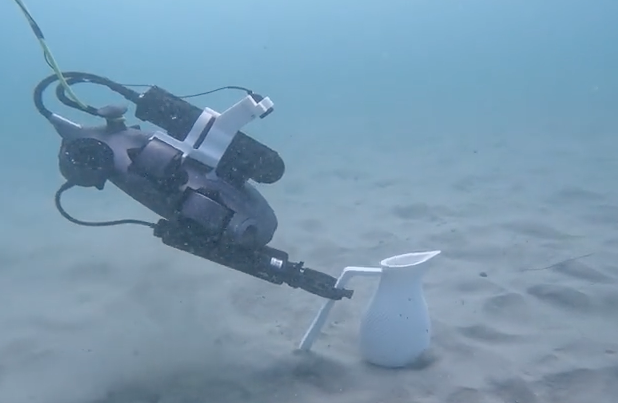 UMI-Underwater: Learning Underwater Manipulation without Underwater Teleoperation
UMI-Underwater: Learning Underwater Manipulation without Underwater Teleoperation
Hao Li*, Long Yin Chung*, Jack Goler, Ryan Zhang, Xiaochi Xie, Huy Ha, Shuran Song, Mark Cutkosky
RSS 2026
Webpage •
Paper •
Code

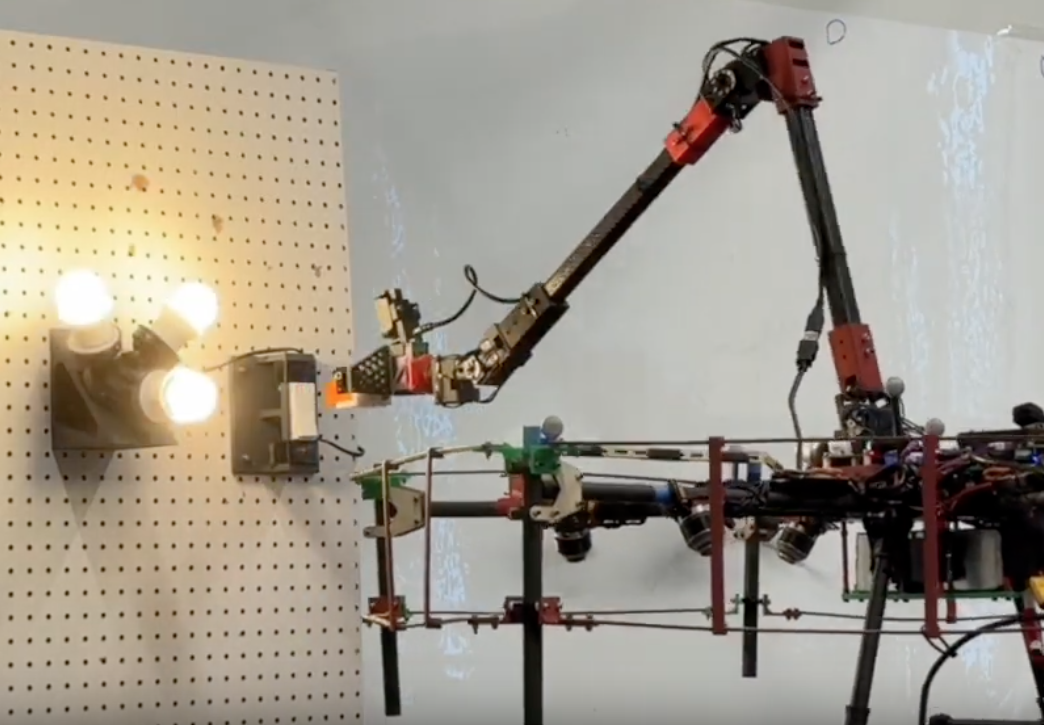
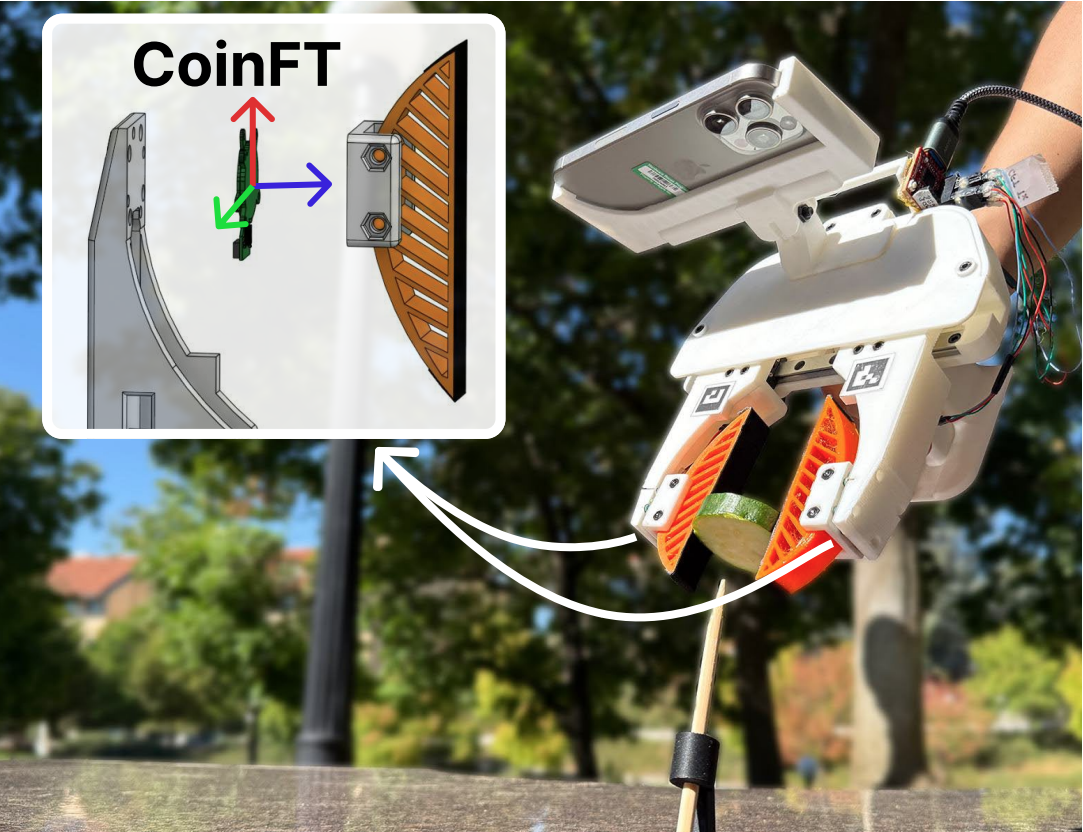 In-the-Wild Compliant Manipulation with UMI-FT
In-the-Wild Compliant Manipulation with UMI-FT
Hojung Choi*, Yifan Hou*, Chuer Pan, Seongheon Hong, Austin Patel, Xiaomeng Xu, Mark Cutkosky, and Shuran Song
ICRA 2026
Webpage •
Paper •
Hardware •
Code
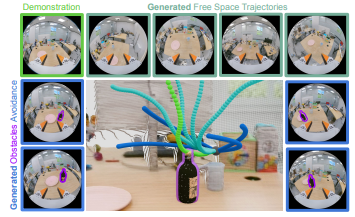
 UMI-on-Air: Embodiment-Aware Guidance for Embodiment-Agnostic Visuomotor Policies
UMI-on-Air: Embodiment-Aware Guidance for Embodiment-Agnostic Visuomotor Policies
Harsh Gupta, Xiaofeng Gao, Huy Ha, Chuer Pan, Muqing Cao, Dongjae Lee, Sebastian Scherer, Shuran Song, Guanya Shi
ICRA 2026
Webpage •
Paper •
Code
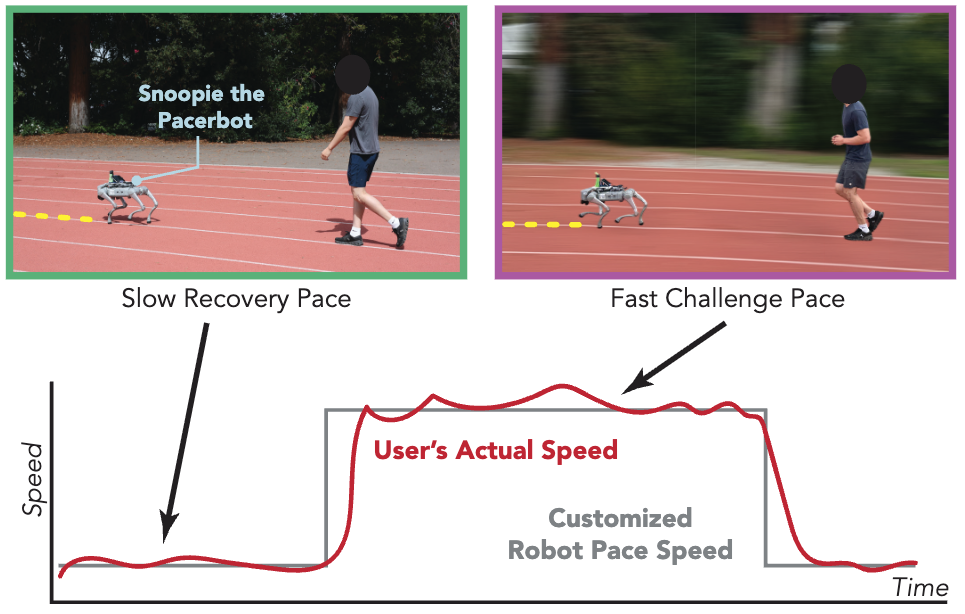 Will People Enjoy a Robot Trainer? A Case Study with Snoopie the Pacerbot
Will People Enjoy a Robot Trainer? A Case Study with Snoopie the Pacerbot
Maximilian Du, Jennifer Grannen, Shuran Song, Dorsa Sadigh
ICRA 2026
Webpage •
Paper •
 Locomotion Beyond Feet
Locomotion Beyond Feet
Tae Hoon Yang, Jiacheng Hu, Haochen Shi, Zhicong Zhang, Daniel Jiang, Weizhuo Wang, Yao He, Zhen Wu, Yifan Hou, Monroe Kennedy, Shuran Song, Karen Liu
arXiv 2025
Webpage •
Paper •
Code •
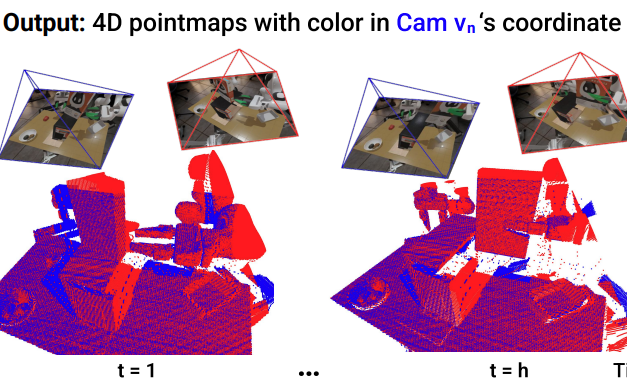 Geometry-aware 4D Video Generation for Robot Manipulation
Geometry-aware 4D Video Generation for Robot Manipulation
Zeyi Liu, Shuang Li, Eric Cousineau, Siyuan Feng, Benjamin Burchfiel, Shuran Song
ICLR 2026
Webpage •
Paper •
Code •
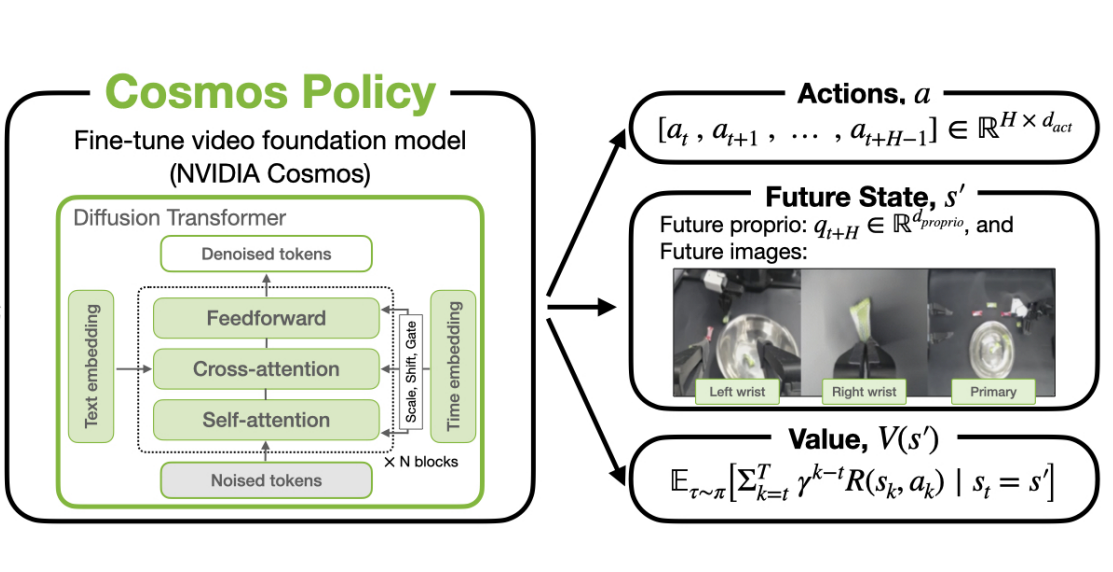 Cosmos Policy: Fine-Tuning Video Models for Visuomotor Control and Planning
Cosmos Policy: Fine-Tuning Video Models for Visuomotor Control and Planning
Moo Jin Kim, Yihuai Gao, Tsung-Yi Lin, Yen-Chen Lin, Yunhao Ge, Grace Lam, Percy Liang, Shuran Song, Ming-Yu Liu, Chelsea Finn, Jinwei Gu
ICLR 2026
Webpage •
Paper •
Code •
 Latent Policy Barrier: Learning Robust Visuomotor Policies by Staying In-Distribution
Latent Policy Barrier: Learning Robust Visuomotor Policies by Staying In-Distribution
Zhanyi Sun, Shuran Song
NeurIPS 2025
Spotlight Presentation •
Webpage •
Paper •
Code
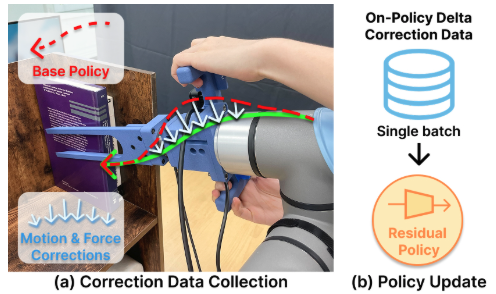 Compliant Residual DAgger: Improving Real-World Contact-Rich Manipulation with Human Corrections
Compliant Residual DAgger: Improving Real-World Contact-Rich Manipulation with Human Corrections
Xiaomeng Xu, Yifan Hou, Chendong Xin, Zeyi Liu, Shuran Song
NeurIPS 2025
Webpage •
Paper •
Code
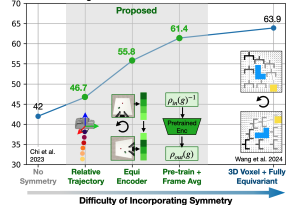 A Practical Guide for Incorporating Symmetry in Diffusion Policy
A Practical Guide for Incorporating Symmetry in Diffusion Policy
Dian Wang, Boce Hu, Shuran Song, Robin Walters, Robert Platt
NeurIPS 2025
Paper
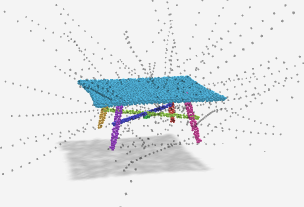 Rectified Point Flow: Generic Point Cloud Pose Estimation
Rectified Point Flow: Generic Point Cloud Pose Estimation
Tao Sun, Liyuan Zhu, Shengyu Huang, Shuran Song, Iro Armeni
NeurIPS 2025
Spotlight Presentation •
Webpage •
Paper •
Code
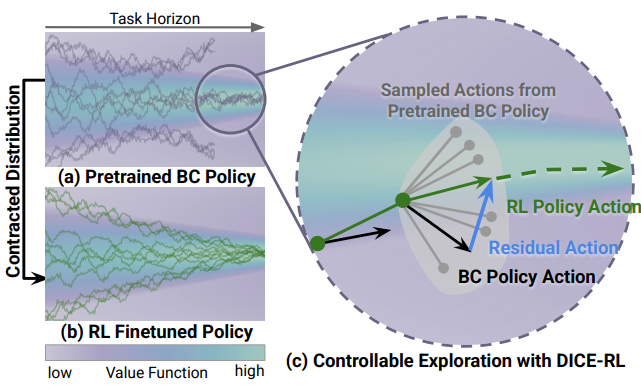
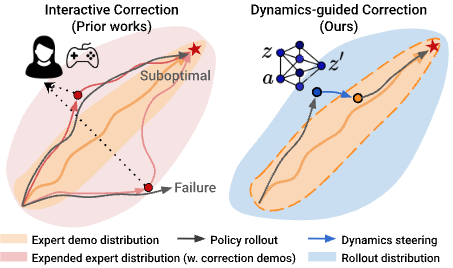
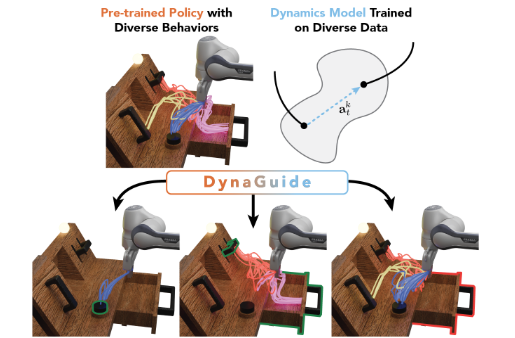
Mengda Xu*, Han Zhang*, Yifan Hou, Zhenjia Xu, Linxi Fan, Manuela Veloso, Shuran Song
CoRL 2025
Best Paper Finalist •
Oral Presentation •
Webpage •
Paper •
Code •
Hardware
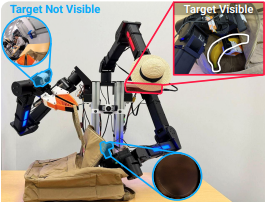 Vision in Action: Learning Active Perception from Human Demonstrations
Vision in Action: Learning Active Perception from Human Demonstrations
Haoyu Xiong, Xiaomeng Xu, Jimmy Wu, Yifan Hou, Jeannette Bohg, Shuran Song
CoRL 2025
Webpage •
Paper •
Code •
Hardware
Kaizhe Hu*, Haochen Shi*, Yao He, Weizhuo Wang, C. Karen Liu†, Shuran Song†
CoRL 2025
Webpage •
Paper •
Code •
Hardware
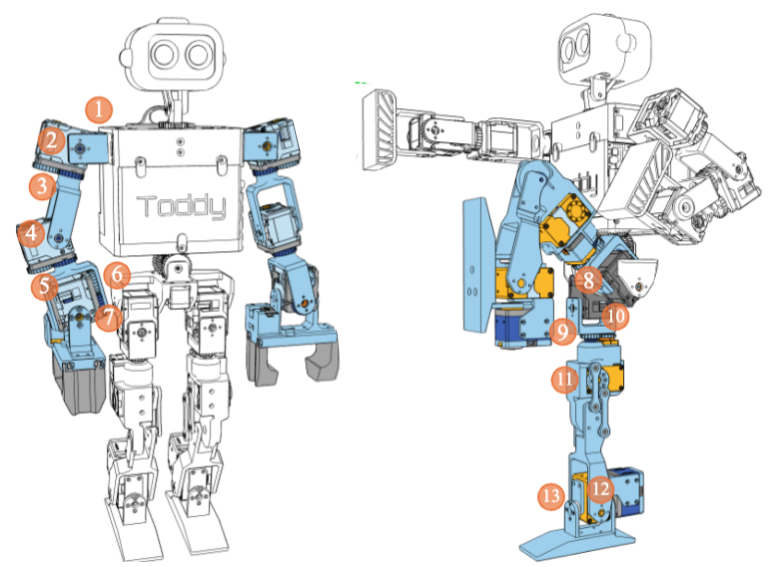 ToddlerBot: Open-Source ML-Compatible Humanoid Platform for Loco-Manipulation
ToddlerBot: Open-Source ML-Compatible Humanoid Platform for Loco-Manipulation
Haochen Shi, Weizhuo Wang, Shuran Song, C. Karen Liu
CoRL 2025
Webpage •
Paper •
Hardware+Code
 One Demo is Worth a Thousand Trajectories: Action-View Augmentation for Visuomotor Policies
One Demo is Worth a Thousand Trajectories: Action-View Augmentation for Visuomotor Policies
Chuer Pan, Litian Liang, Dominik Bauer, Eric Cousineau, Benjamin Burchfiel, Siyuan Feng, Shuran Song
CoRL 2025
Webpage •
Paper •
Code
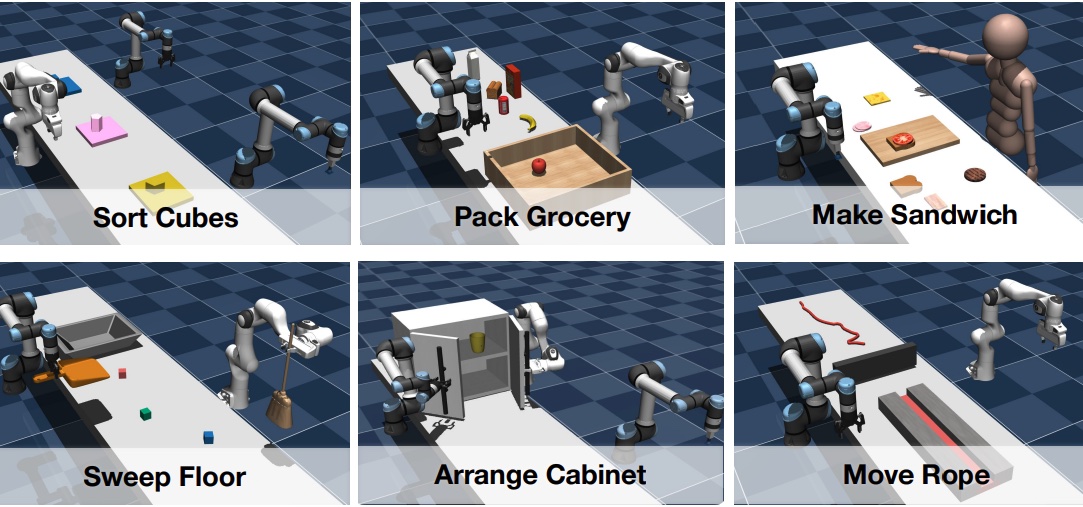
Yunfan Jiang, Ruohan Zhang, Josiah Wong, Chen Wang, Yanjie Ze, Hang Yin, Cem Gokmen, Shuran Song, Jiajun Wu, Li Fei-Fei
CoRL 2025
Webpage •
Paper •
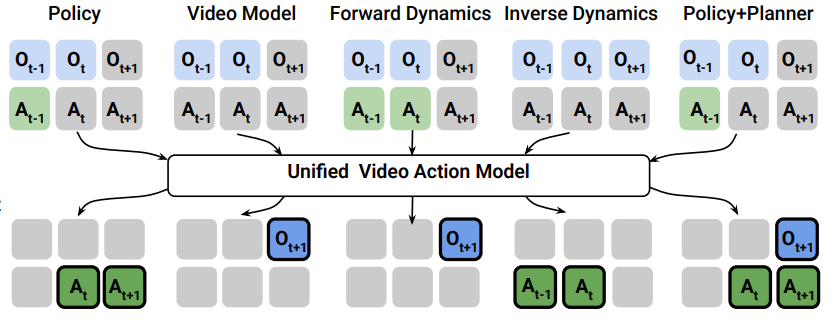 Unified Video Action Model
Unified Video Action Model
Shuang Li, Yihuai Gao, Dorsa Sadigh, Shuran Song
RSS 2025
Webpage •
Paper •
Code+Model
Xiaomeng Xu, Dominik Bauer, Shuran Song
RSS 2025
Webpage •
Paper •
Hardware+Code
Ruoshi Liu, Huy Ha, Mengxue Hou, Shuran Song, Carl Vondrick
ICRA 2025
Webpage •
Paper •
Code
 Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control
Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control
Yifan Hou, Zeyi Liu, Cheng Chi, Eric Cousineau, Naveen Kuppuswamy, Siyuan Feng, Benjamin Burchfiel, and Shuran Song
ICRA 2025
Webpage •
Paper •
Code
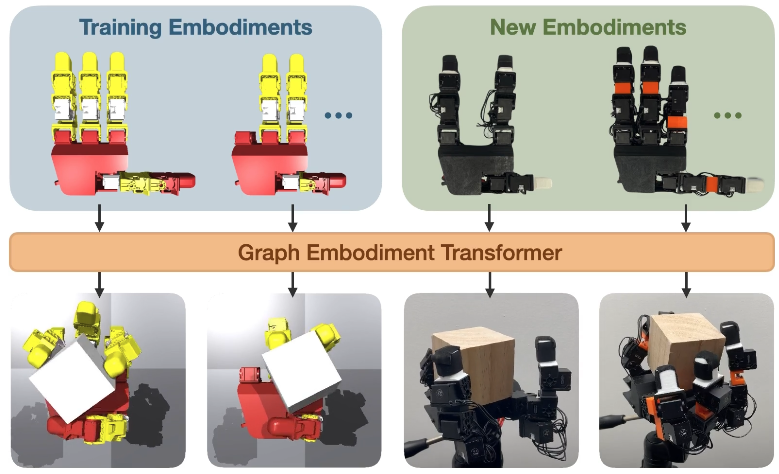 GET-Zero: Graph Embodiment Transformer for Zero-shot Embodiment Generalization
GET-Zero: Graph Embodiment Transformer for Zero-shot Embodiment Generalization
Austin Patel and Shuran Song
ICRA 2025
Webpage •
Paper •
Code
 Real2Code: Reconstruct Articulated Objects via Code Generation
Real2Code: Reconstruct Articulated Objects via Code Generation
Zhao Mandi, Yijia Weng, Dominik Bauer, Shuran Song
ICRL 2025
Webpage •
Paper •
Code
 TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
Jimmy Wu, William Chong, Robert Holmberg, Aaditya Prasad, Yihuai Gao, Oussama Khatib, Shuran Song, Szymon Rusinkiewicz, Jeannette Bohg
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
Hardware Guide
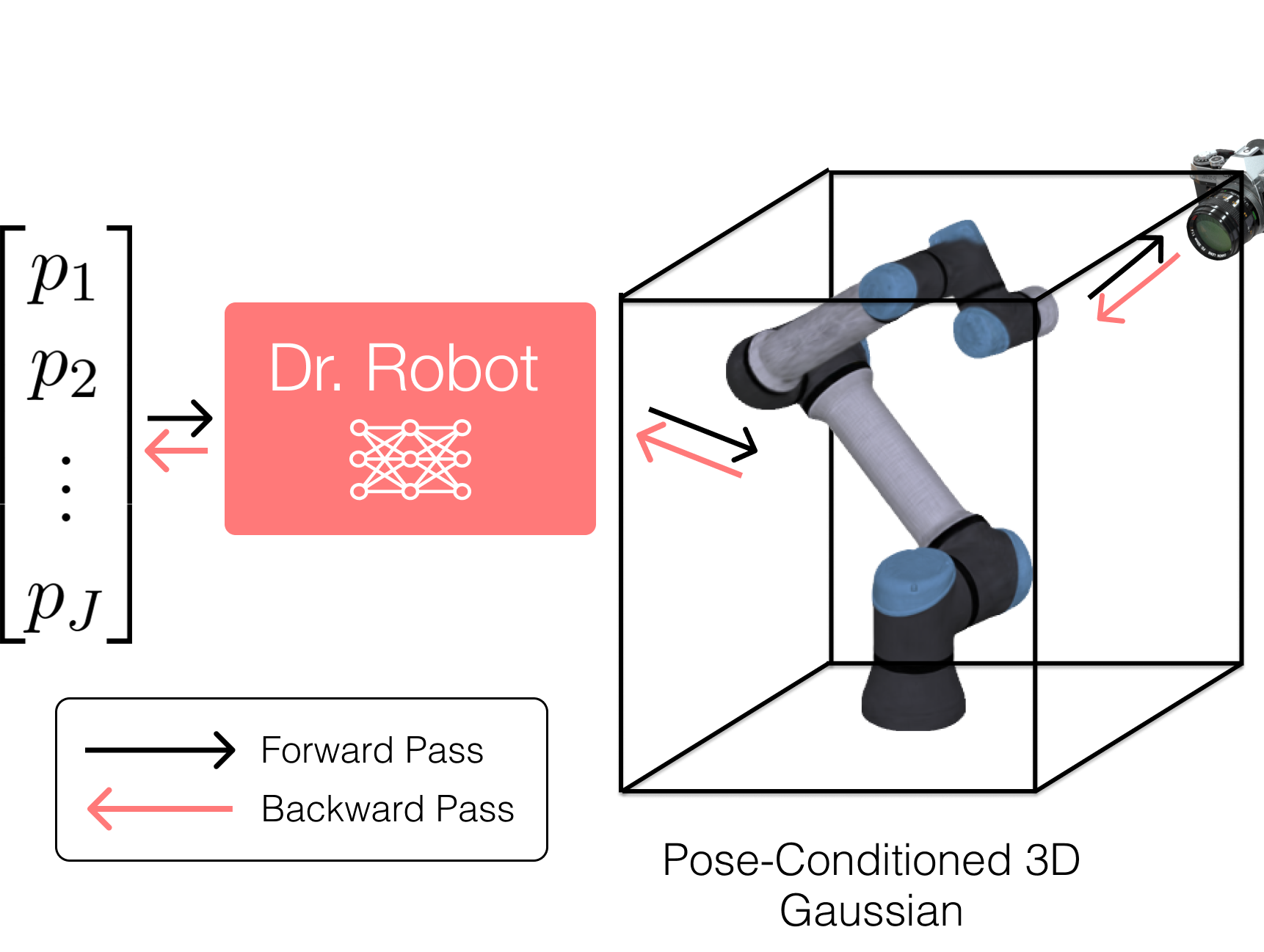 Differentiable Robot Rendering
Differentiable Robot Rendering
Ruoshi Liu, Alper Canberk, Shuran Song, Carl Vondrick
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
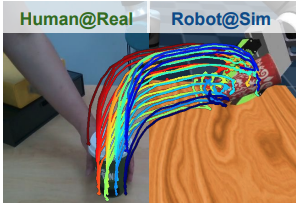 Flow as the Cross-domain Manipulation Interface
Flow as the Cross-domain Manipulation Interface
Mengda Xu, Zhenjia Xu, Yinghao Xu, Cheng Chi, Gordon Wetzstein, Manuela Veloso, Shuran Song
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
Huy Ha*, Yihuai Gao*, Zipeng Fu, Jie Tan, Shuran Song
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
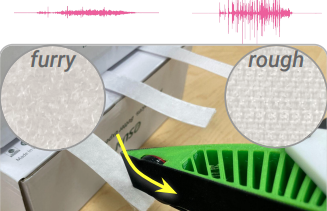 ManiWAV: Learning Robot Manipulation from In-the-Wild Audio-Visual Data
ManiWAV: Learning Robot Manipulation from In-the-Wild Audio-Visual Data
Zeyi Liu, Cheng Chi, Eric Cousineau, Naveen Kuppuswamy, Benjamin Burchfiel, Shuran Song
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
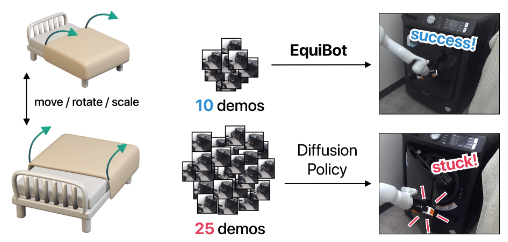 EquiBot: SIM(3)-Equivariant Diffusion Policy for Generalizable and Data Efficient Learning
EquiBot: SIM(3)-Equivariant Diffusion Policy for Generalizable and Data Efficient Learning
Jingyun Yang*, Zi-ang Cao*, Congyue Deng, Rika Antonova, Shuran Song, Jeannette Bohg
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
 Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang*, Ruoshi Liu*, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
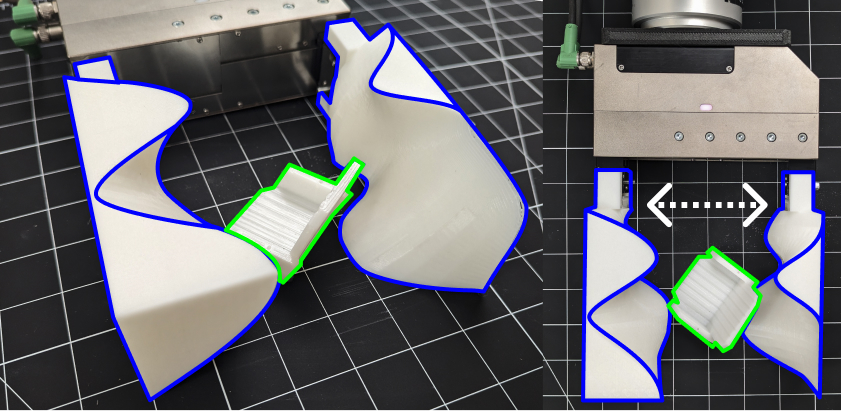 Dynamics-Guided Diffusion Model for Robot Manipulator Design
Dynamics-Guided Diffusion Model for Robot Manipulator Design
Xiaomeng Xu, Huy Ha, Shuran Song
Conference on Robot Learning (CoRL 2024)
Webpage •
Paper •
Code
Ruoshi Liu, Junbang Liang, Sruthi Sudhakar, Huy Ha, Cheng Chi, Shuran Song, Carl Vondrick
arXiv 2024
Webpage •
Paper •
Code
Dominik Bauer, Zhenjia Xu, Shuran Song
ECCV 2024
Webpage •
Paper •
Code
Cheng Chi*, Zhenjia Xu*, Chuer Pan, Eric Cousineau, Ben Burchfiel, Siyuan Feng, Russ Tedrake, Shuran Song
RSS 2024
Outstanding System Paper Finalist •
Webpage •
Paper •
Code
 DROID: A Large-Scale In-the-Wild Robot Manipulation Dataset
DROID: A Large-Scale In-the-Wild Robot Manipulation Dataset
Alexander Khazatsky, Karl Pertsch et al
RSS 2024
Webpage •
Paper •
Code
 RoCo: Dialectic Multi-Robot Collaboration with Large Language Models
RoCo: Dialectic Multi-Robot Collaboration with Large Language Models
Zhao Mandi, Shreeya Jain, Shuran Song
International Conference on Robotics and Automation (ICRA 2024)
Webpage •
Paper •
Code
 Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Abhishek Padalkar et al
International Conference on Robotics and Automation (ICRA 2024)
Best Paper Award •
Webpage •
Paper •
Code
 DataComp: In search of the next generation of multimodal datasets
DataComp: In search of the next generation of multimodal datasets
Samir Yitzhak Gadre*, Gabriel Ilharco*, Alex Fang* et al.
NeurIPS, 2023 (oral)
Webpage •
Paper •
Code
Huy Ha, Pete Florence, Shuran Song
Conference on Robot Learning 2023
Webpage •
Paper •
Code
 REFLECT: Summarizing Robot Experiences for Failure Explanation and Correction
REFLECT: Summarizing Robot Experiences for Failure Explanation and Correction
Zeyi Liu*, Arpit Bahety*, Shuran Song
Conference on Robot Learning 2023
Webpage •
Paper •
Code
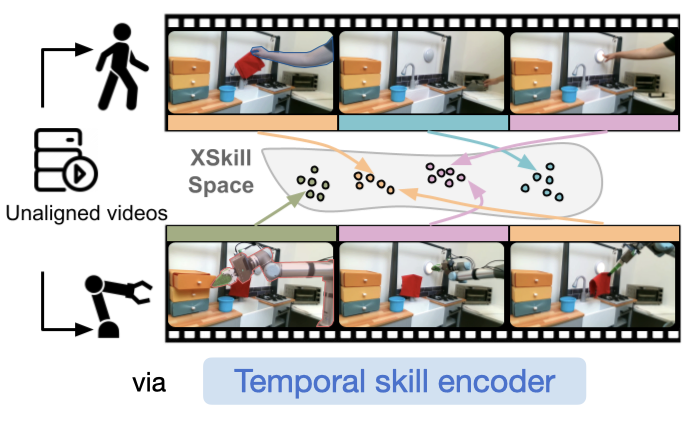 XSkill: Cross Embodiment Skill Discovery
XSkill: Cross Embodiment Skill Discovery
Mengda Xu, Zhenjia Xu, Cheng Chi, Manuela Veloso, Shuran Song
Conference on Robot Learning 2023
Webpage •
Paper •
Code
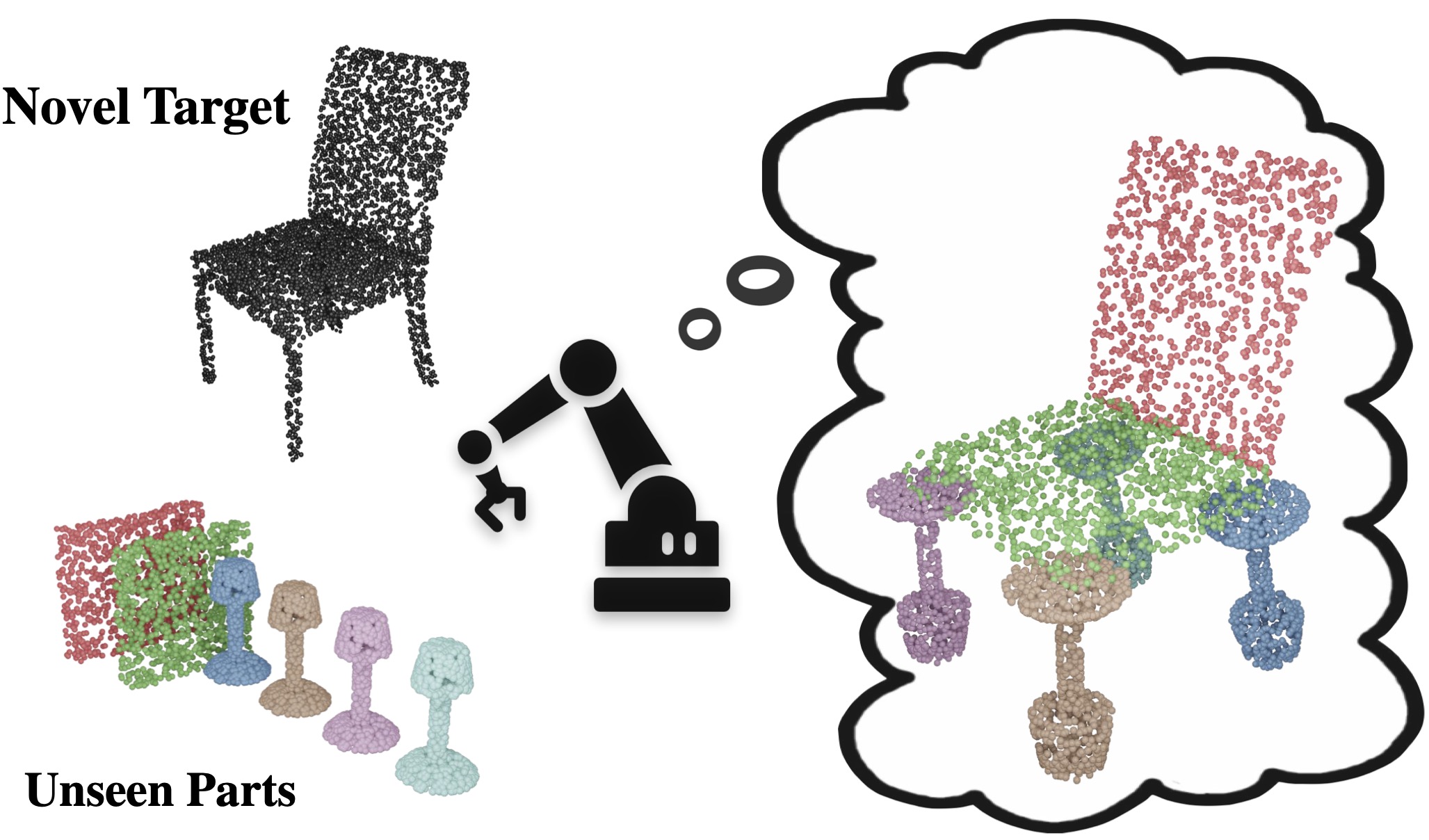 Rearrangement Planning for General Part Assembly
Rearrangement Planning for General Part Assembly
Yulong Li, Andy Zeng, Shuran Song
Conference on Robot Learning 2023
Oral Presentation •
Webpage •
Paper •
Code
 TidyBot: Personalized Robot Assistance with Large Language Models
TidyBot: Personalized Robot Assistance with Large Language Models
Jimmy Wu, Rika Antonova, Adam Kan, Marion Lepert, Andy Zeng, Shuran Song, Jeannette Bohg, Szymon Rusinkiewicz, Thomas Funkhouser
Autonomous Robots (AuRo) - Special Issue: Large Language Models in Robotics, 2023
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Webpage •
Paper •
Code •
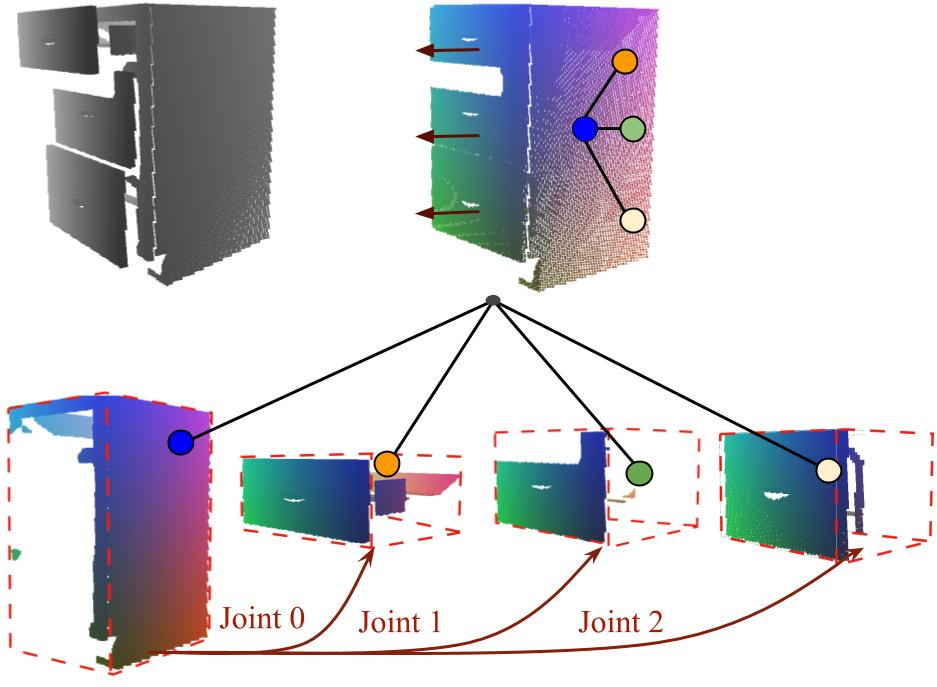
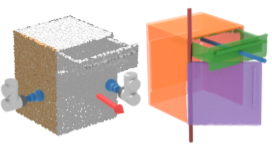 Structure From Action: Learning Interactions for Articulated Object 3D Structure Discovery
Structure From Action: Learning Interactions for Articulated Object 3D Structure Discovery
Neil Nie, Samir Yitzhak Gadre, Kiana Ehsani, Shuran Song
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Webpage •
Paper
 Bag All You Need: Learning a Generalizable Bagging Strategy for Heterogeneous Objects
Bag All You Need: Learning a Generalizable Bagging Strategy for Heterogeneous Objects
Arpit Bahety*, Shreeya Jain*, Huy Ha, Nathalie Hager, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Webpage •
Paper
 Diffusion Policy: Visuomotor Policy Learning via Action Diffusion
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion
Cheng Chi, Siyuan Feng, Yilun Du, Zhenjia Xu, Eric Cousineau, Benjamin Burchfiel, Shuran Song
Robotics: Science and Systems (RSS) 2023
Webpage •
Paper •
Code •
 RoboNinja: Learning an Adaptive Cutting Policy for Multi-Material Objects
RoboNinja: Learning an Adaptive Cutting Policy for Multi-Material Objects
Zhenjia Xu, Zhou Xian, Xingyu Lin, Cheng Chi, Zhiao Huang, Chuang Gan, Shuran Song
Robotics: Science and Systems (RSS) 2023
Webpage •
Paper •
Code & Simulation •
 CoWs on Pasture: Baselines and Benchmarks for Language-Driven Zero-Shot Object Navigation
CoWs on Pasture: Baselines and Benchmarks for Language-Driven Zero-Shot Object Navigation (a.k.a Clip on Wheels)
Samir Yitzhak Gadre, Mitchell Wortsman, Gabriel Ilharco, Ludwig Schmidt, Shuran Song
Conference on Computer Vision and Pattern Recognition (CVPR 2022)
Webpage •
Paper
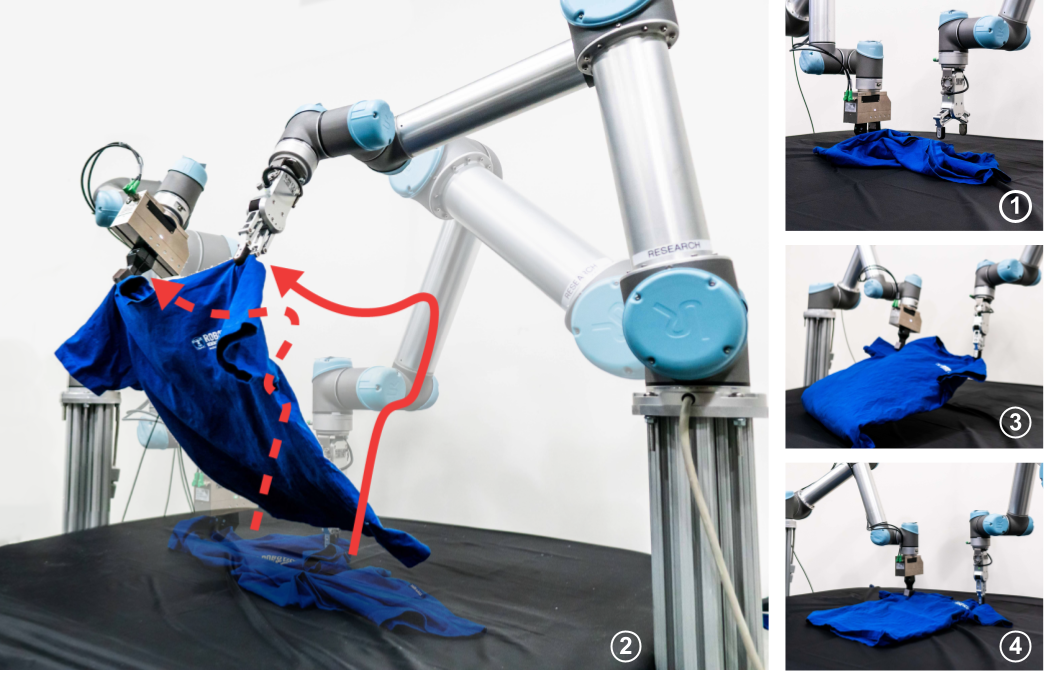
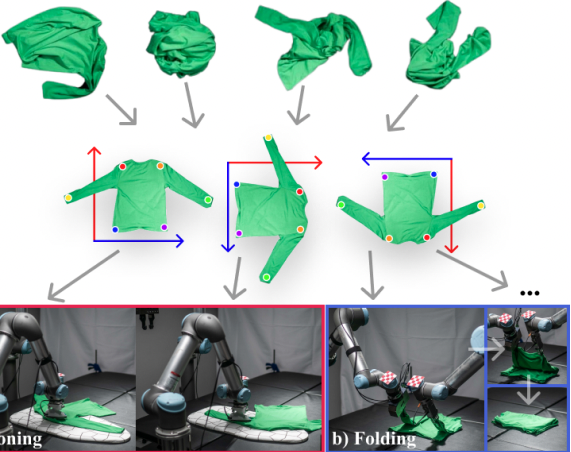 Cloth Funnels: Canonicalized-Alignment for Multi-Purpose Garment Manipulation
Cloth Funnels: Canonicalized-Alignment for Multi-Purpose Garment Manipulation
Alper Canberk, Cheng Chi, Huy Ha, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song
International Conference on Robotics and Automation (ICRA 2023)
Webpage •
Paper •
 TANDEM3D: Active Tactile Exploration for 3D Object Recognition
TANDEM3D: Active Tactile Exploration for 3D Object Recognition
Jingxi Xu*, Han Lin*, Shuran Song, Matei Ciocarlie
International Conference on Robotics and Automation (ICRA 2023)
Webpage •
Paper •
 Semantic Abstraction: Open-World 3D Scene Understanding from 2D Vision-Language Models
Semantic Abstraction: Open-World 3D Scene Understanding from 2D Vision-Language Models
Huy Ha, Shuran Song
Conference on Robot Learning (CoRL2022)
Webpage •
Paper •
Code •
Demo on Huggingface
 BusyBot: Learning to Interact, Reason, and Plan in a BusyBoard Environment
BusyBot: Learning to Interact, Reason, and Plan in a BusyBoard Environment
Zeyi Liu, Zhenjia Xu, Shuran Song
Conference on Robot Learning (CoRL2022)
Webpage •
Paper •
Code
 ASPiRe: Adaptive Skill Priors for Reinforcement Learning
ASPiRe: Adaptive Skill Priors for Reinforcement Learning
Mengda Xu, Manuela Veloso, Shuran Song
Conference on Neural Information Processing Systems (NeurIPS 2022)
Webpage •
Paper •
Code
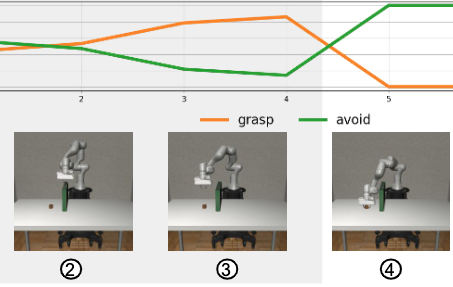
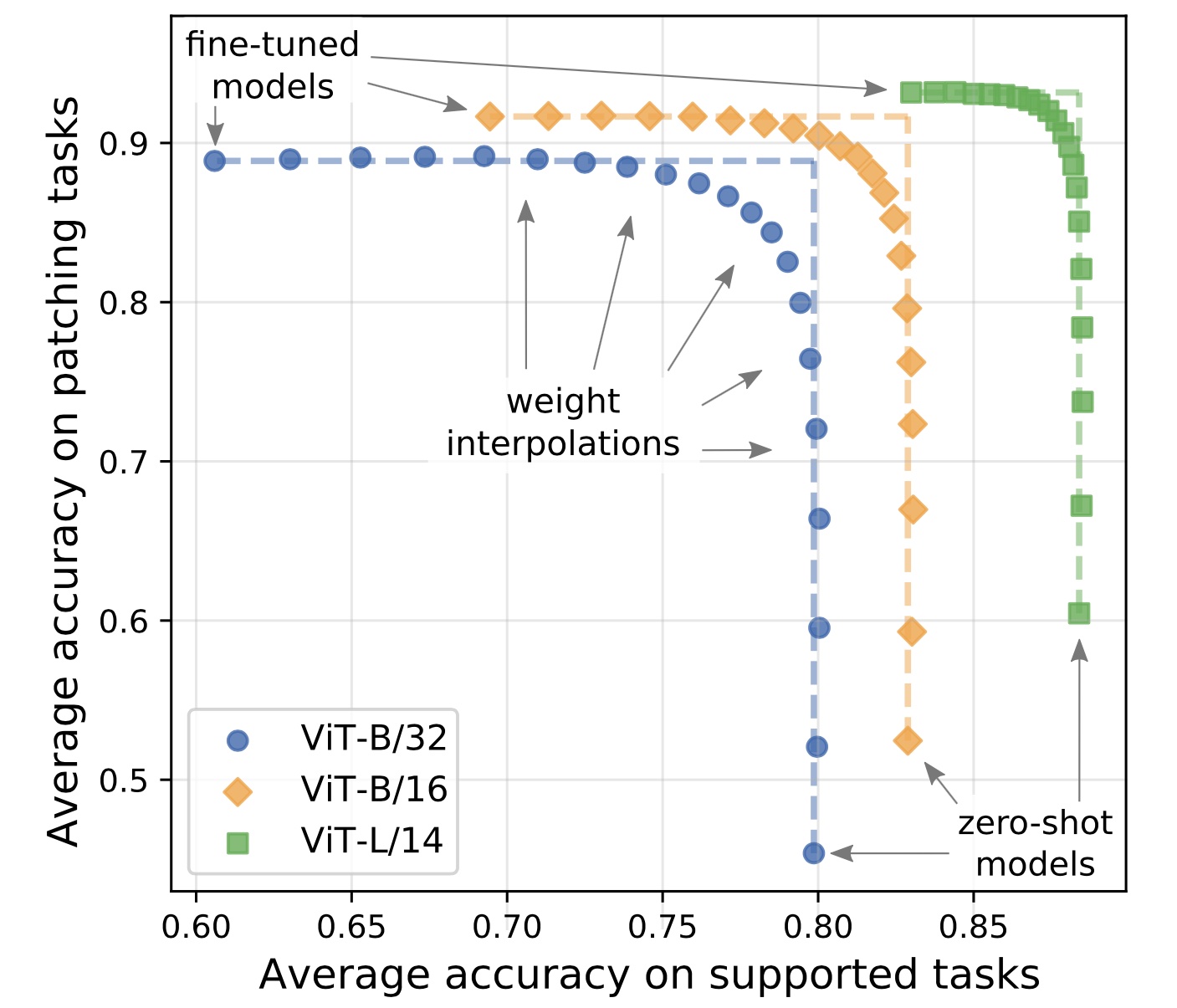 Patching open-vocabulary models by interpolating weights
Patching open-vocabulary models by interpolating weights
Gabriel Ilharco*, Mitchell Wortsman*, Samir Yitzhak Gadre*, Shuran Song, Hannaneh Hajishirzi Simon Kornblith, Ali Farhadi, Ludwig Schmidt
Conference on Neural Information Processing Systems (NeurIPS 2022)
Webpage •
Paper
• Code
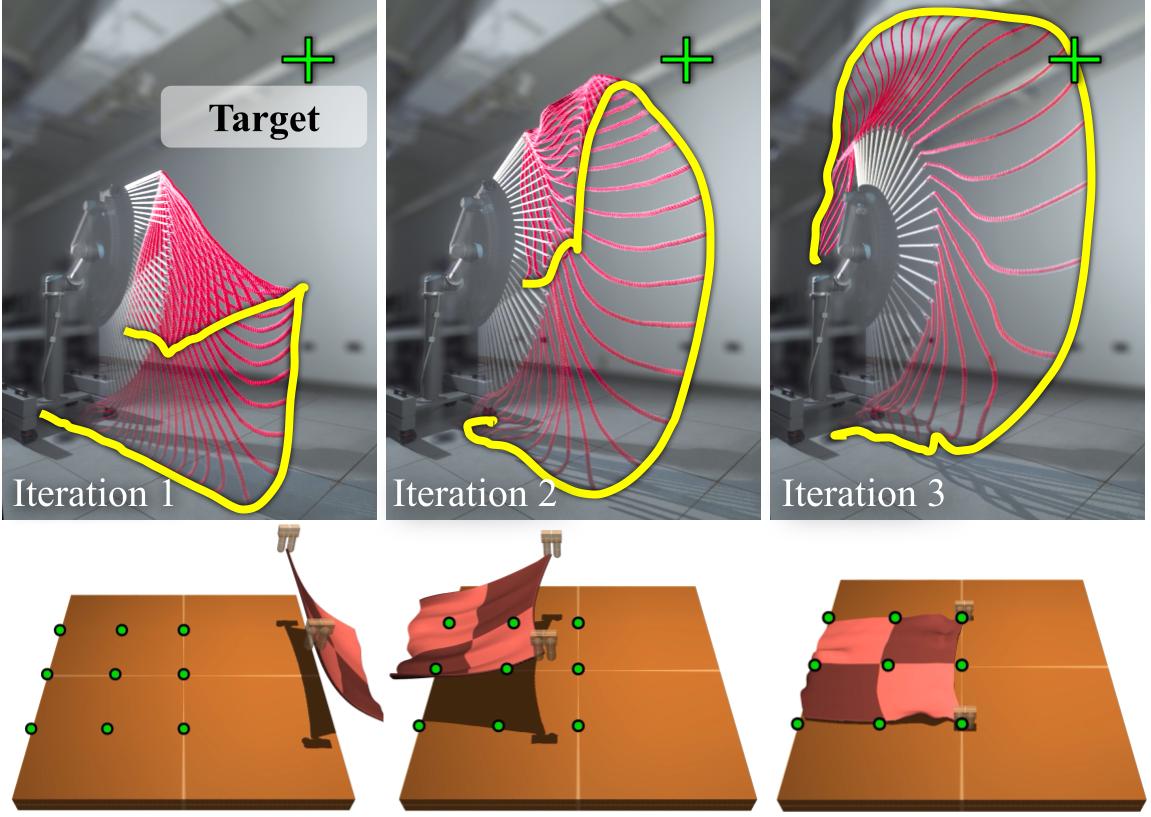 Iterative Residual Policy for Goal-Conditioned Dynamic Manipulation of Deformable Objects
Iterative Residual Policy for Goal-Conditioned Dynamic Manipulation of Deformable Objects
Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song
Robotics: Science and Systems (RSS) 2022
Best Paper Award •
Best Student Paper Finalist •
Webpage •
Paper
• Code
 DextAIRity: Deformable Manipulation Can be a Breeze
DextAIRity: Deformable Manipulation Can be a Breeze
Zhenjia Xu, Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song
Robotics: Science and Systems (RSS) 2022
Best System Paper Finalist •
Webpage •
Paper
• Code
 Learning Pneumatic Non-Prehensile Manipulation with a Mobile Blower
Learning Pneumatic Non-Prehensile Manipulation with a Mobile Blower
Jimmy Wu, Xingyuan Sun, Andy Zeng, Shuran Song, Szymon Rusinkiewicz, Thomas Funkhouser
Robotics and Automation Letters (RA-L) 2022
Intelligent Robots and Systems (IROS) 2022
Webpage •
Paper
• Code
 FlingBot: The Unreasonable Effectiveness of Dynamic Manipulations for Cloth Unfolding
FlingBot: The Unreasonable Effectiveness of Dynamic Manipulations for Cloth Unfolding
Huy Ha, Shuran Song
Conference on Robot Learning (CoRL2021)
Best System Paper Award •
Webpage •
Paper •
Code
 Fit2Form: 3D Generative Model for Robot Gripper Form Design
Fit2Form: 3D Generative Model for Robot Gripper Form Design
Huy Ha*, Shubham Agrawal*, Shuran Song
Conference on Robot Learning (CoRL) 2020
Webpage •
Paper
Code
 Grasping in the Wild: Learning 6DoF Closed-Loop Grasping from Low-Cost Demonstrations
Grasping in the Wild: Learning 6DoF Closed-Loop Grasping from Low-Cost Demonstrations
Shuran Song, Andy Zeng, Johnny Lee, Thomas Funkhouser
Intelligent Robots and Systems (IROS) 2020
Robotics and Automation Letters (RA-L) 2020
Webpage •
PDF
 TANDEM: Learning Joint Exploration and Decision Making with Tactile Sensors
TANDEM: Learning Joint Exploration and Decision Making with Tactile Sensors
Jingxi Xu, Shuran Song, Matei Ciocarlie
Robotics and Automation Letters (RA-L) 2022
Intelligent Robots and Systems (IROS) 2022
Webpage •
Paper
 Scene Editing as Teleoperation: A Case Study in 6DoF Kit Assembly
Scene Editing as Teleoperation: A Case Study in 6DoF Kit Assembly
Shubham Agrawal*, Yulong Li*, Jen-Shuo Liu, Steven K. Feiner, Shuran Song
Intelligent Robots and Systems (IROS) 2022
Webpage •
Paper
 Continuous Scene Representations for Embodied AI
Continuous Scene Representations for Embodied AI
Samir Yitzhak Gadre, Kiana Ehsani, Shuran Song, Roozbeh Mottaghi,
Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2022)
Webpage •
Paper
 UMPNet: Universal Manipulation Policy Network for Articulated Objects
UMPNet: Universal Manipulation Policy Network for Articulated Objects
Zhenjia Xu, Zhanpeng He, Shuran Song
Robotics and Automation Letters (RA-L) and ICRA 2022
Webpage •
Paper
 FishGym: A High-Performance Physics-based Simulation Framework for Underwater Robot Learning
FishGym: A High-Performance Physics-based Simulation Framework for Underwater Robot Learning
Wenji Liu, Kai Bai, Xuming He, Shuran Song, Changxi Zheng, and Xiaopei Liu
International Conference on Robotics and Automation (ICRA 2022)
Code •
Paper
 Leveraging SE(3) Equivariance for Self-supervised Category-Level Object Pose Estimation from Point Clouds
Leveraging SE(3) Equivariance for Self-supervised Category-Level Object Pose Estimation from Point Clouds
Xiaolong Li, Yijia Weng, Li Yi, Leonidas Guibas, A. Lynn Abbott, Shuran Song, He Wang
NeurIPS, 2021
Webpage •
Paper •
Code
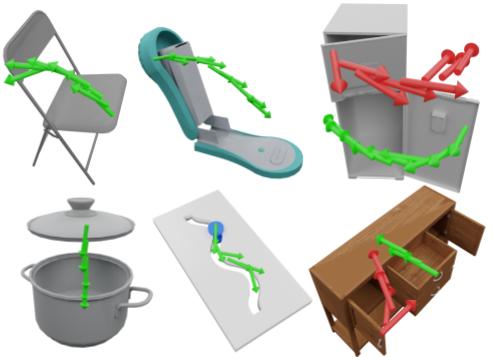
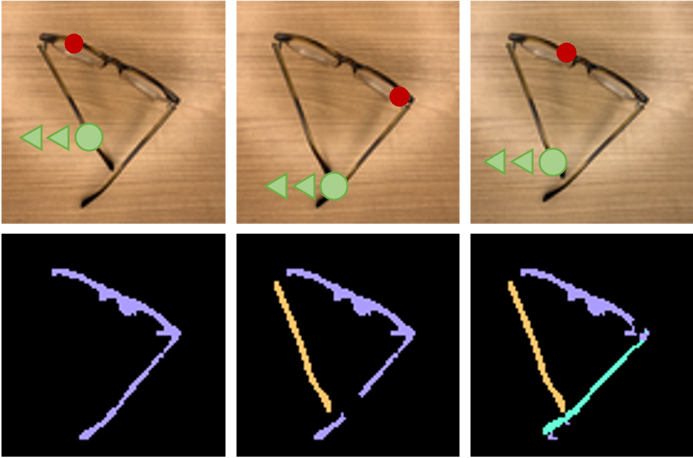
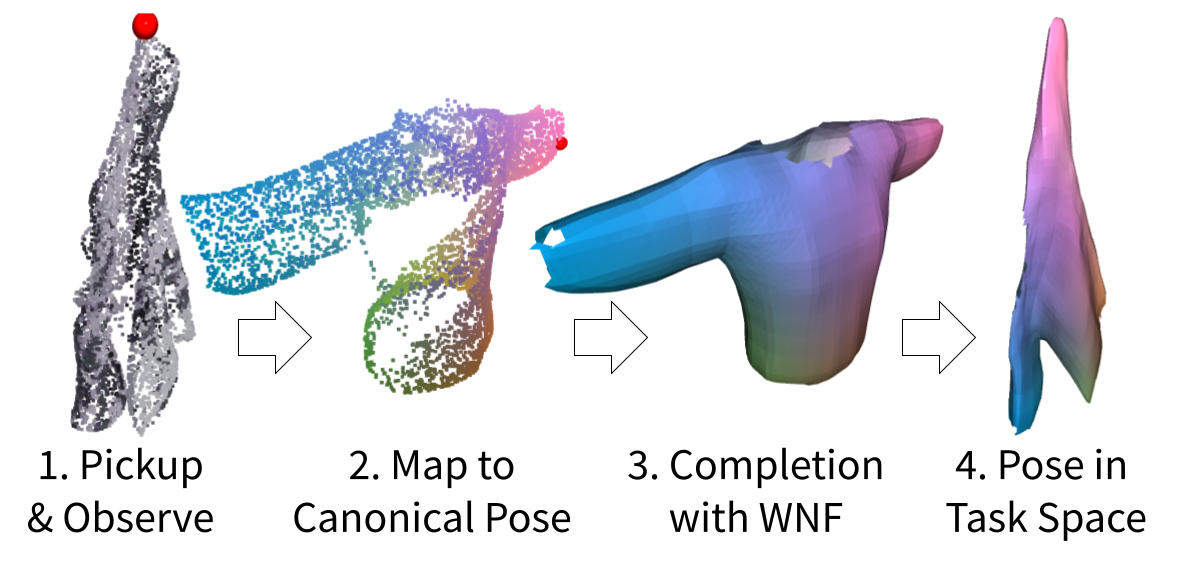 GarmentNets: Category-Level Pose Estimation for Garments via Canonical Space Shape Completion
GarmentNets: Category-Level Pose Estimation for Garments via Canonical Space Shape Completion
Cheng Chi, Shuran Song
IEEE International Conference on Computer Vision (ICCV2021)
Webpage •
Paper •
Code
 Act the Part: Learning Interaction Strategies for Articulated Object Part Discovery
Act the Part: Learning Interaction Strategies for Articulated Object Part Discovery
Samir Yitzhak Gadre, Kiana Ehsani, Shuran Song
IEEE International Conference on Computer Vision (ICCV2021)
Webpage (with online Demo!) •
Paper •
Code
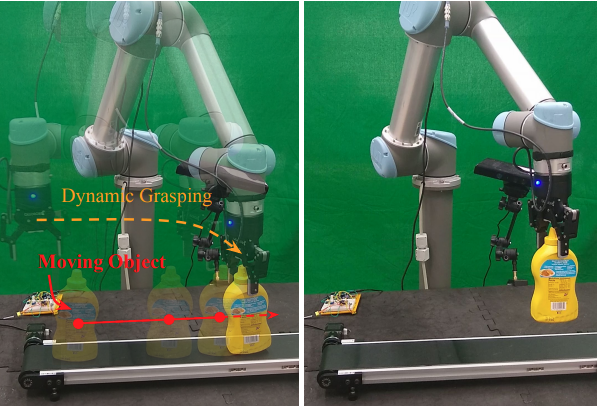 Dynamic Grasping with Reachability and Motion Awareness
Dynamic Grasping with Reachability and Motion Awareness
Iretiayo Akinola*, Jingxi Xu*, Shuran Song, and Peter Allen
International Conference on Intelligent Robots and Systems (IROS) 2021
Webpage •
Paper
 AdaGrasp: Learning an Adaptive Gripper-Aware Grasping Policy
AdaGrasp: Learning an Adaptive Gripper-Aware Grasping Policy
Zhenjia Xu, Beichun Qi, Shubham Agrawal, Shuran Song
International Conference on Robotics and Automation (ICRA 2021)
Webpage •
Paper •
Code
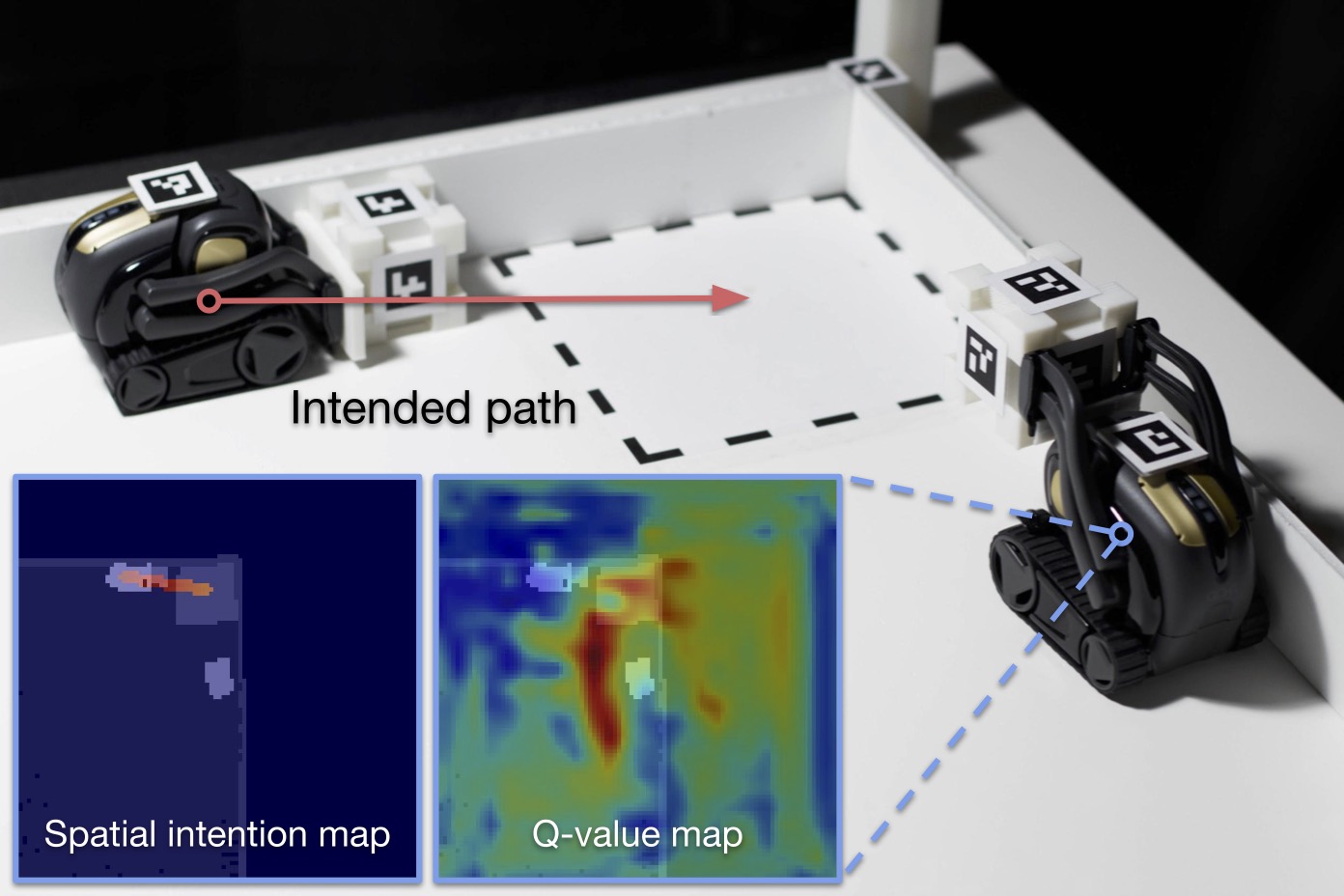 Spatial Intention Maps for Multi-Agent Mobile Manipulation
Spatial Intention Maps for Multi-Agent Mobile Manipulation
Jimmy Wu, Xingyuan Sun, Andy Zeng, Shuran Song, Szymon Rusinkiewicz, Thomas Funkhouser
International Conference on Robotics and Automation (ICRA 2021)
Webpage •
Paper •
Code
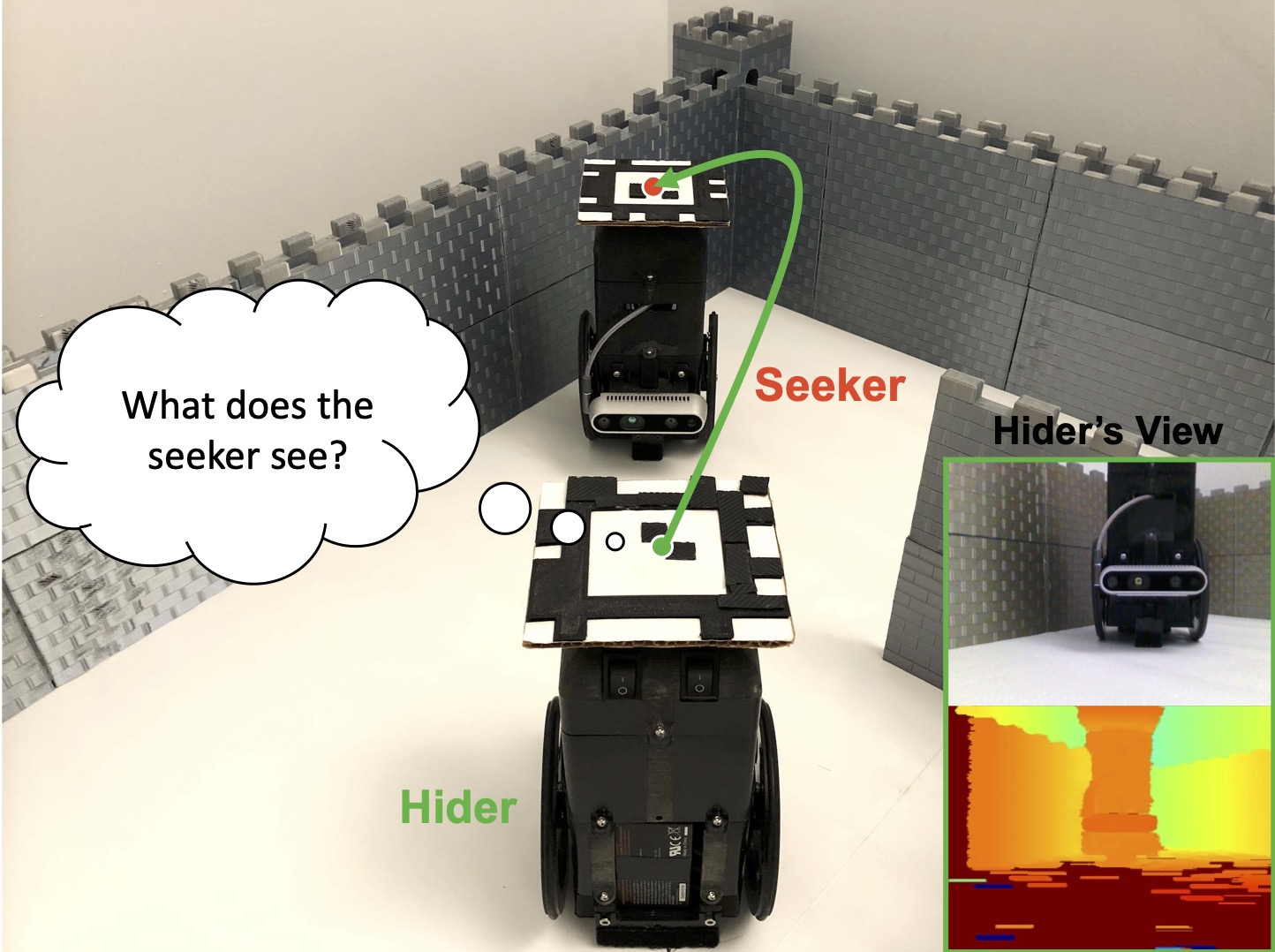 Visual Perspective Taking for Opponent Behavior Modeling
Visual Perspective Taking for Opponent Behavior Modeling
Boyuan Chen, Yuhang Hu, Robert Kwiatkowski, Shuran Song, Hod Lipson
International Conference on Robotics and Automation (ICRA 2021)
Webpage •
Paper •
Code
 SSCNav: Confidence-Aware Semantic Scene Completion for Visual Semantic Navigation
SSCNav: Confidence-Aware Semantic Scene Completion for Visual Semantic Navigation
Yiqing Liang, Boyuan Chen, Shuran Song
International Conference on Robotics and Automation (ICRA 2021)
Webpage •
Paper •
Code
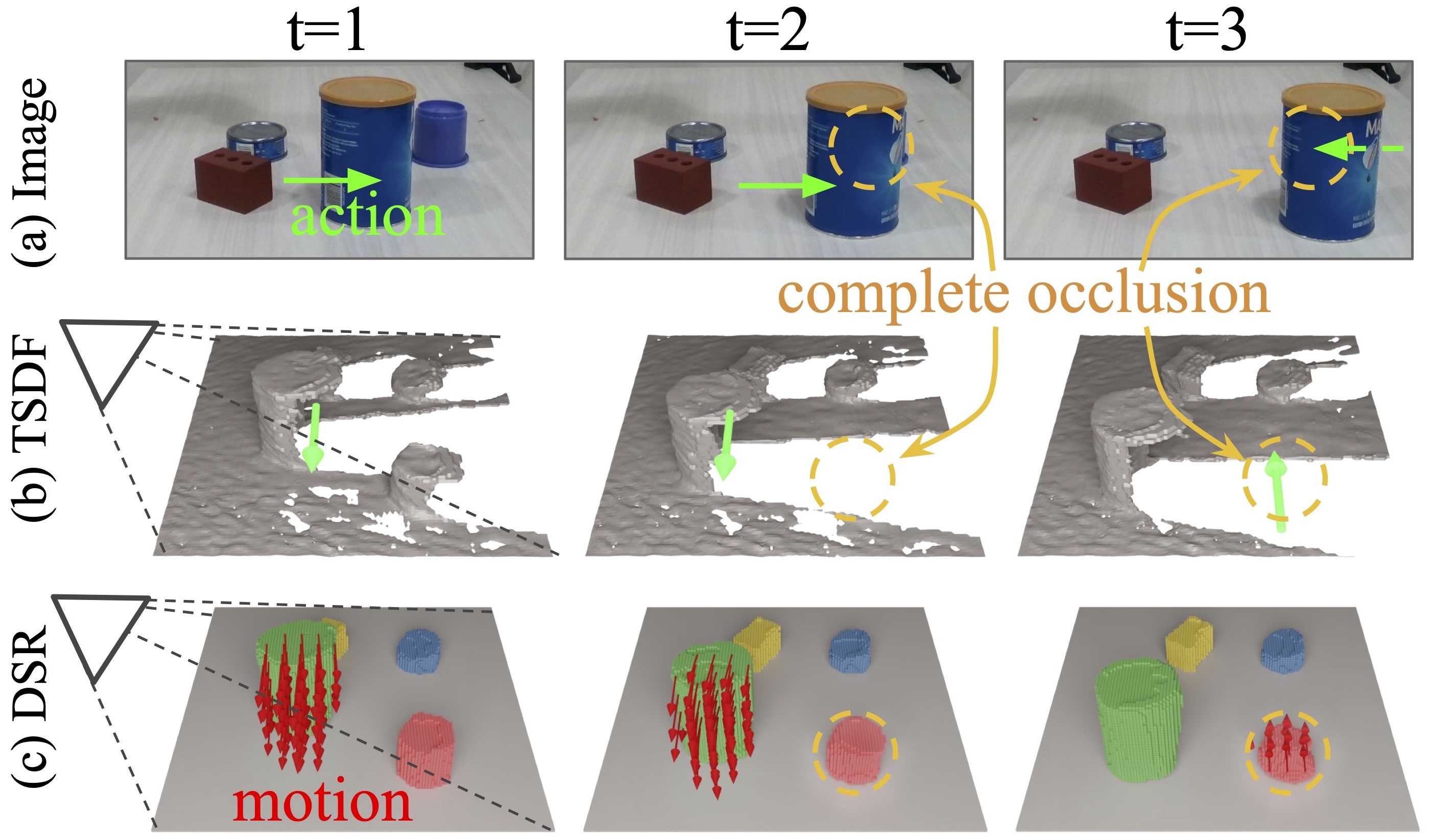 Learning 3D Dynamic Scene Representations for Robot Manipulation
Learning 3D Dynamic Scene Representations for Robot Manipulation
Zhenjia Xu*, Zhanpeng He*, Jiajun Wu, Shuran Song
Conference on Robot Learning (CoRL) 2020
Webpage •
Paper •
Code
 Learning a Decentralized Multi-arm Motion Planner
Learning a Decentralized Multi-arm Motion Planner
Huy Ha, Jingxi Xu, Shuran Song
Conference on Robot Learning (CoRL) 2020
Webpage •
Paper •
Code
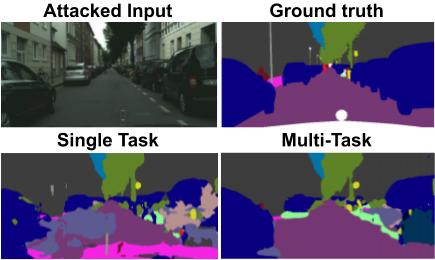 Multi-task Learning Increases Adversarial Robustness
Multi-task Learning Increases Adversarial Robustness
Chengzhi Mao, Amogh Gupta, Vikram Nitin, Baishakhi Ray, Shuran Song, Junfeng Yang, Carl Vondrick
European Conference on Computer Vision (ECCV) 2020
Oral Presentation •
PDF
 Spatial Action Maps for Mobile Manipulation
Spatial Action Maps for Mobile Manipulation
Jimmy Wu, Xingyuan Sun, Andy Zeng, Shuran Song, Johnny Lee, Szymon Rusinkiewicz, Thomas Funkhouser
Robotics: Science and Systems (RSS) 2020
Webpage •
PDF
 Category-Level Articulated Object Pose Estimation
Category-Level Articulated Object Pose Estimation
Xiaolong Li, He Wang, Li Yi, Leonidas Guibas, A. Lynn Abbott, Shuran Song
Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2020
Oral Presentation •
Webpage •
PDF
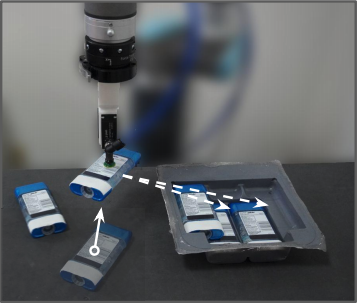 Form2Fit: Learning Shape Priors for Generalizable Assembly from Disassembly
Form2Fit: Learning Shape Priors for Generalizable Assembly from Disassembly
Kevin Zakka, Andy Zeng, Johnny Lee, Shuran Song
International Conference on Robotics and Automation (ICRA 2020)
Best Paper Award in Automation Finalist •
Webpage •
PDF
Shreeyak S. Sajjan, Matthew Moore, Mike Pan, Ganesh Nagaraja, Johnny Lee, Andy Zeng, Shuran Song
International Conference on Robotics and Automation (ICRA 2020)
Webpage •
PDF
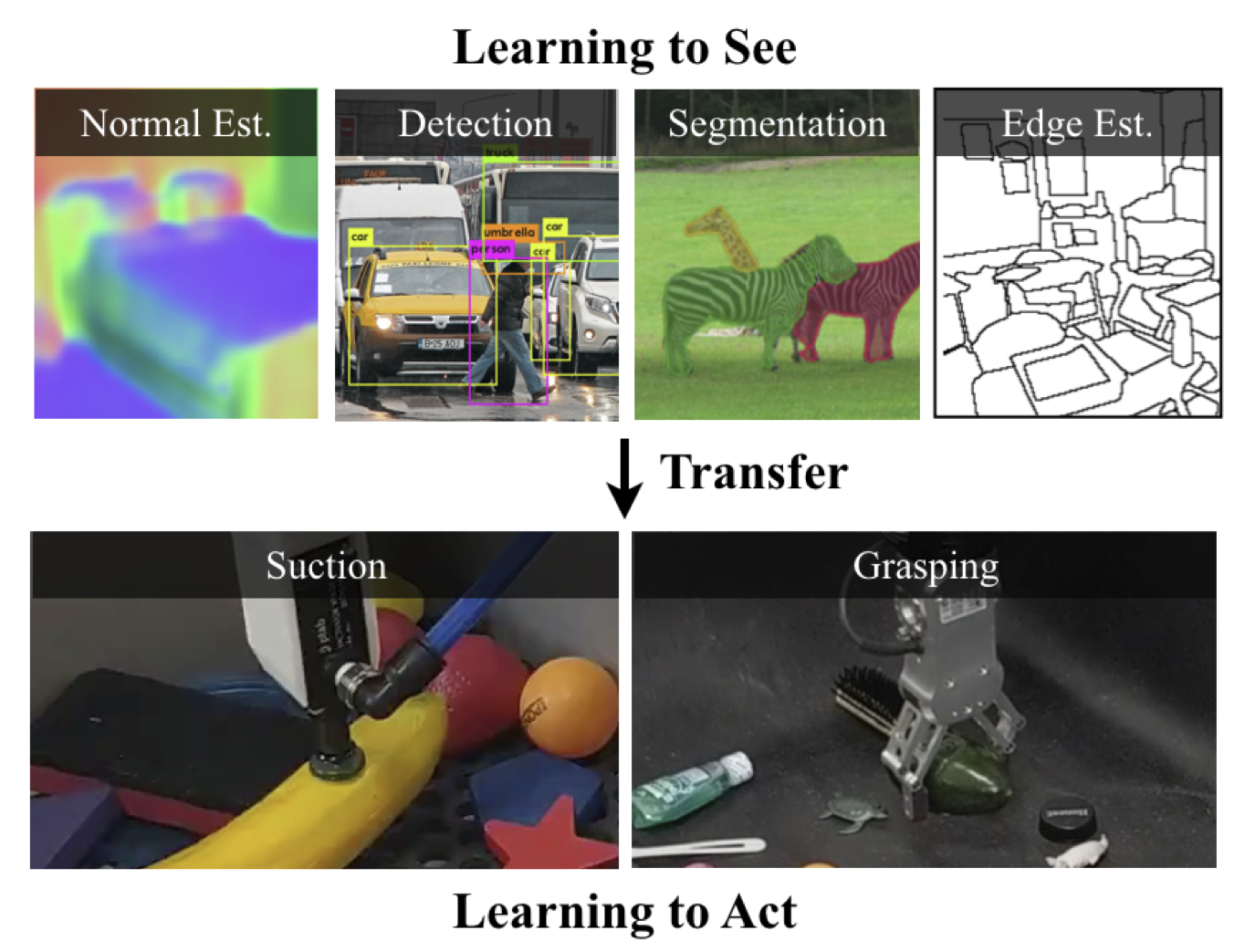 Learning to See before Learning to Act: Visual Pre-training for Manipulation
Learning to See before Learning to Act: Visual Pre-training for Manipulation
Lin Yen-Chen, Andy Zeng, Shuran Song, Phillip Isola, Tsung-Yi Lin
International Conference on Robotics and Automation (ICRA 2020)
Webpage •
PDF
 TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
TossingBot: Learning to Throw Arbitrary Objects with Residual Physics
Andy Zeng, Shuran Song, Stefan Welker, Johnny Lee, Alberto Rodriguez, Thomas Funkhouser
Robotics: Science and Systems 2019 (RSS 2019)
IEEE Transactions on Robotics (T-RO 2020)
Best System Paper Award Best Student Paper Finalist •
Webpage •
PDF
 DensePhysNet: Learning Dense Physical Object Representations via Multi-step Dynamic Interactions
DensePhysNet: Learning Dense Physical Object Representations via Multi-step Dynamic Interactions
Zhenjia Xu, Jiajun Wu, Andy Zeng, Joshua Tenenbaum, Shuran Song
Robotics: Science and Systems 2019 (RSS 2019)
Webpage •
PDF
 Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation
Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation
He Wang, Srinath Sridhar, Jingwei Huang, Julien Valentin, Shuran Song , Leonidas J. Guibasi
Proceedings of 32th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2019)
Oral Presentation •
Webpage •
PDF
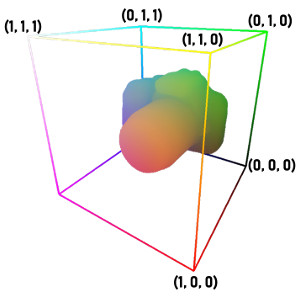
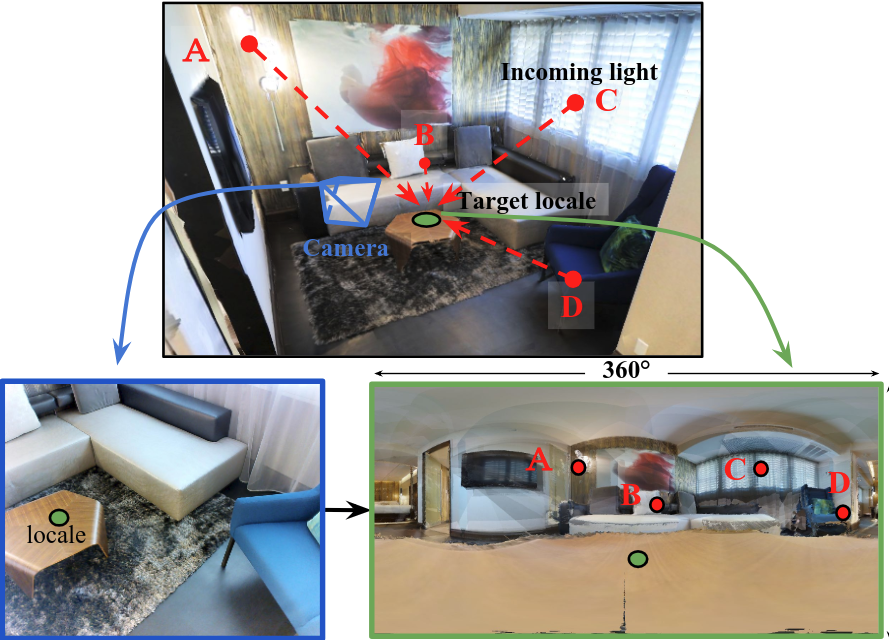 Neural Illumination: Lighting Prediction for Indoor Environments
Neural Illumination: Lighting Prediction for Indoor Environments
Shuran Song and Thomas Funkhouser
Proceedings of 32th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2019)
Oral Presentation •
Webpage •
PDF
 Neural Graph Matching Networks for Fewshot 3D Action Recognition
Neural Graph Matching Networks for Fewshot 3D Action Recognition
Michelle Guo, Edward Chou, Shuran Song, De-An Huang, Serena Yeung, Li Fei-Fei
European Conference on Computer Vision (ECCV2018)
PDF
 Learning Synergies between Pushing and Grasping with Self-supervised Deep Reinforcement Learning
Learning Synergies between Pushing and Grasping with Self-supervised Deep Reinforcement Learning
A. Zeng, S. Song, S. Welker, J. Lee, A. Rodriguez, T. Funkhouser
Intelligent Robots and Systems (IROS) 2020
Best Cognitive Robotics Paper Award Finalist •
Webpage •
PDF
 Im2Pano3D: Extrapolating 360° Structure and Semantics Beyond the Field of View
Im2Pano3D: Extrapolating 360° Structure and Semantics Beyond the Field of View
S. Song, A. Zeng, A. X. Chang, M. Savva, S. Savarese, T. Funkhouser
Proceedings of 31th IEEE Conference on Computer Vision and Pattern Recognition CVPR2018
Oral Presentation •
Webpage •
PDF
 Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
A. Zeng, S. Song, K. Yu, E. Donlon, F. R. Hogan, M. Bauza, D. Ma, O. Taylor, M. Liu, E. Romo, N. Fazeli, F. Alet, N. C. Dafle, R. Holladay, I. Morona, P. Q. Nair, D. Green, I. Taylor, W. Liu, T. Funkhouser, A. Rodriguez (ICRA2018)
Amazon Robotics Best Systems Paper Award •
Webpage •
PDF
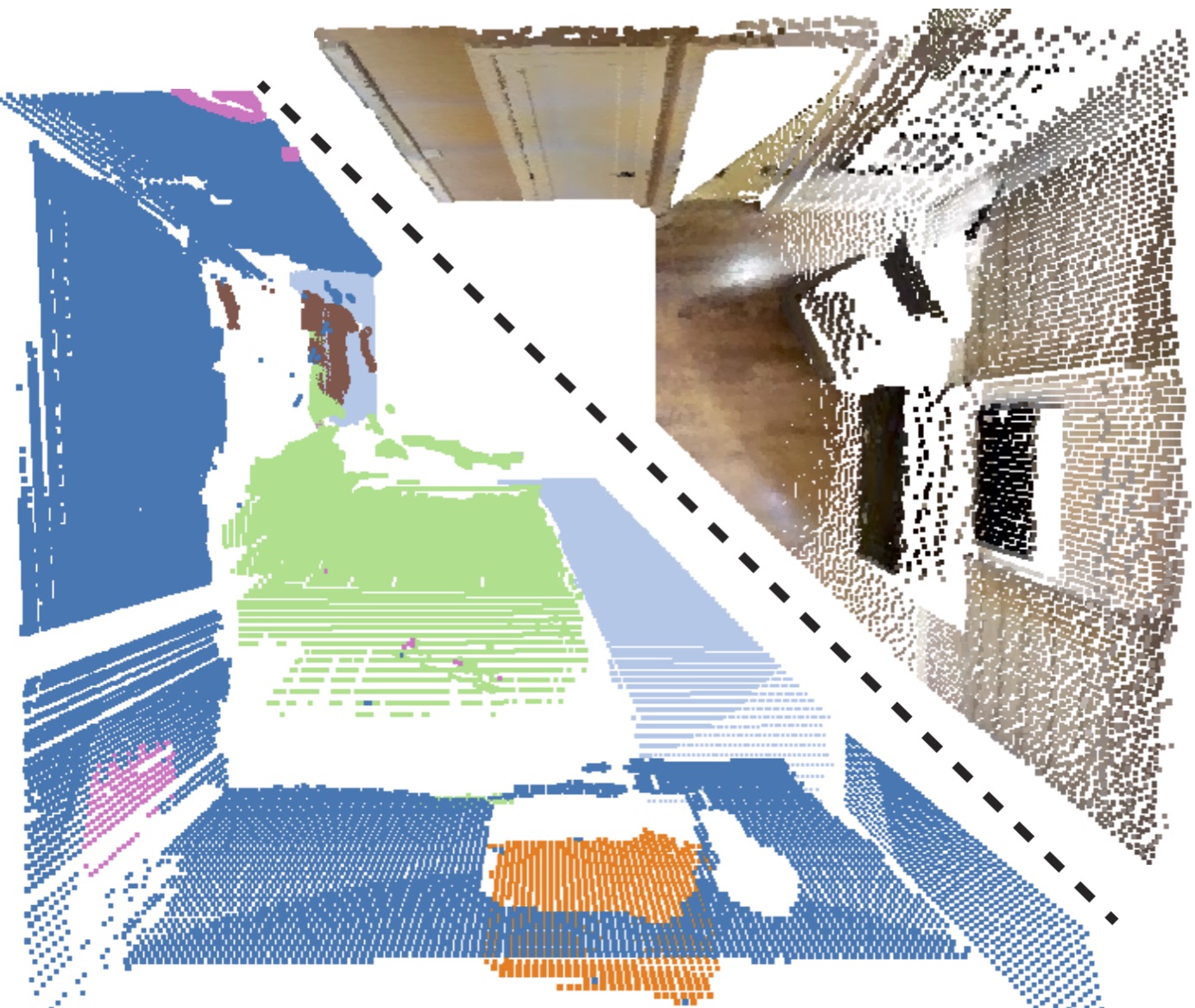
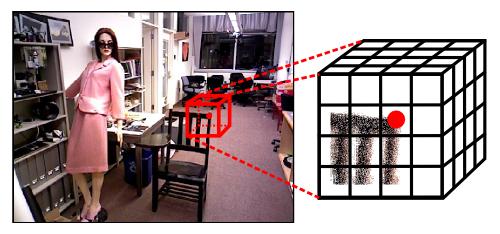
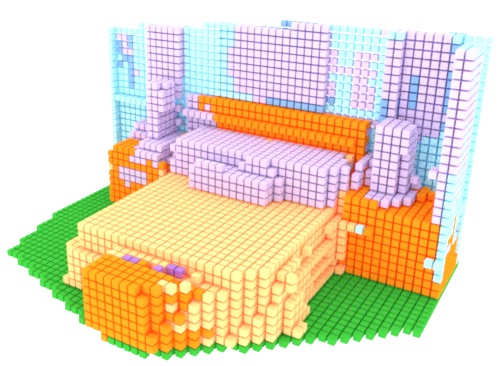 Semantic Scene Completion from a Single Depth Image
Semantic Scene Completion from a Single Depth Image
S. Song, F. Yu, A. Zeng, A. Chang, M. Savva, T. Funkhouser
Proceedings of 30th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2017)
Oral Presentation •
Webpage •
PDF
 3DMatch: Learning the Matching of Local 3D Geometry in Range Scans
3DMatch: Learning the Matching of Local 3D Geometry in Range Scans
A. Zeng, S. Song, M. Nießner, M. Fisher, J. Xiao and T. Funkhouser.
Proceedings of 30th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2017)
Oral Presentation •
Webpage •
PDF
 Physically-Based Rendering for Indoor Scene Understanding Using Convolutional Neural Networks
Physically-Based Rendering for Indoor Scene Understanding Using Convolutional Neural Networks
Y. Zhang*, S. Song*, E. Yumer, M. Savva, J. Lee, H. Jin, T. Funkhouser.
Proceedings of 30th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2017)
Oral Presentation •
Webpage •
PDF
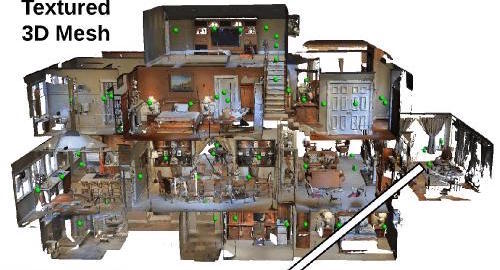 Matterport3D: Learning from RGB-D Data in Indoor Environments
Matterport3D: Learning from RGB-D Data in Indoor Environments
A. X. Chang, A. Dai, T. Funkhouser, M. Halber, M. Nießner, M. Savva, S. Song , A. Zeng, Y. Zhang
IEEE International Conference on 3D Vision (3DV 2017)
Webpage •
PDF
 Multi-view Self-supervised Deep Learning for 6D Pose Estimation in the Amazon Picking Challenge
Multi-view Self-supervised Deep Learning for 6D Pose Estimation in the Amazon Picking Challenge
A. Zeng, K.T. Yu, S. Song, D. Suo, E. Walker Jr., A. Rodriguez, and J. Xiao
International Conference on Robotics and Automation (ICRA2017)
Webpage •
PDF
.jpg) Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images
Deep Sliding Shapes for Amodal 3D Object Detection in RGB-D Images
S. Song, and J. Xiao.
Proceedings of 29th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2016)
Webpage •
PDF
 ShapeNet: An Information-Rich 3D Model Repository
ShapeNet: An Information-Rich 3D Model Repository
A. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, J. Xiao, L. Yi, and F. Yu.
arXiv:1512.03012 [cs.CV] 9 Dec 2015
Webpage •
PDF
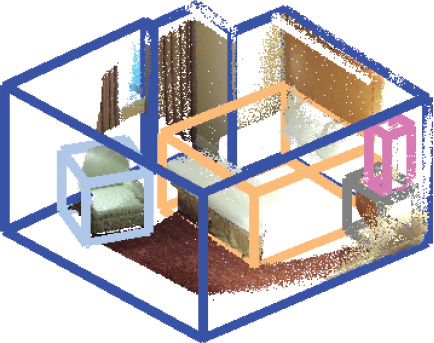 SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite
SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite
S. Song, S. Lichtenberg and J. Xiao
Proceedings of 28th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2015)
Oral Presentation [Watch it on Techtalks] •
Webpage •
PDF
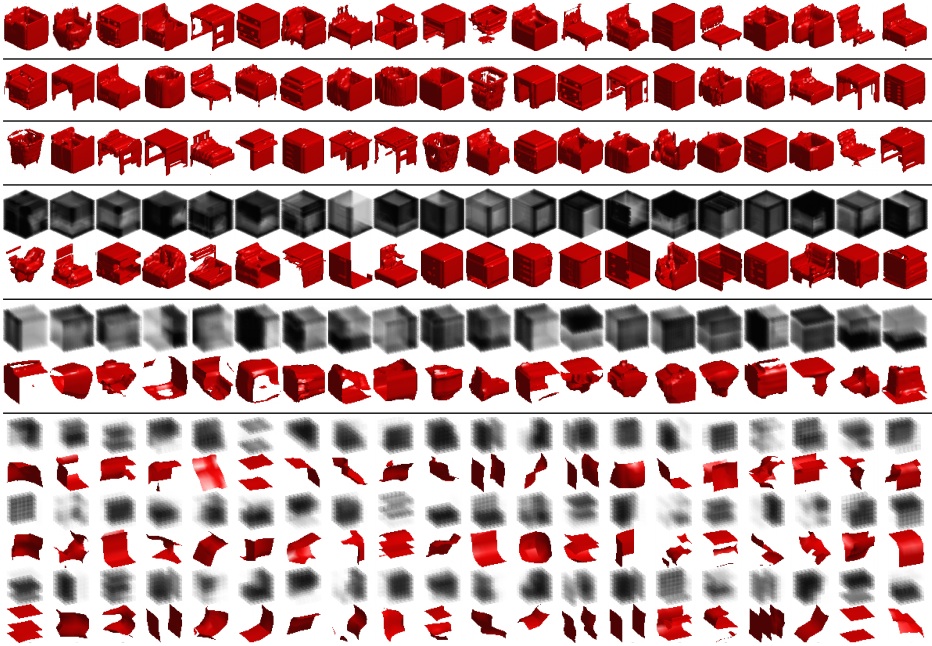 SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite
SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite
Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang and J. Xiao
Proceedings of 28th IEEE Conference on Computer Vision and Pattern Recognition (CVPR2015)
Oral Presentation [Watch it on Techtalks] •
Webpage •
PDF
.jpg) Robot In a Room: Toward Perfect Object Recognition in Closed Environments
Robot In a Room: Toward Perfect Object Recognition in Closed Environments
S. Song, L. Zhang, and J. Xiao.
arXiv:1507.02703 [cs.CV] 9 Jul 2015
Webpage •
PDF
 Construction of a Large-scale Image Dataset using Deep Learning with Humans in the Loop
Construction of a Large-scale Image Dataset using Deep Learning with Humans in the Loop
F. Yu, A. Seff, Y. Zhang, S. Song and J. Xiao.
arXiv:1506.03365 [cs.CV] 10 Jun 2015
Webpage •
PDF
.jpg) Sliding Shapes for 3D Object Detection in Depth Images
Sliding Shapes for 3D Object Detection in Depth Images
S. Song and J. Xiao
Proceedings of the 13th European Conference on Computer Vision (ECCV2014)
Oral Presentation [Watch it on Videolectures] •
Webpage •
PDF
.jpg) PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding
PanoContext: A Whole-room 3D Context Model for Panoramic Scene Understanding
Y. Zhang, S. Song, P. Tan, and J. Xiao
Proceedings of the 13th European Conference on Computer Vision (ECCV2014)
Oral Presentation [Watch it on Videolectures] •
Webpage •
PDF
S. Song and J. Xiao
Proceedings of 14th IEEE International Conference on Computer Vision (ICCV2013)
Webpage •
PDF